機(jī)械臂 長10米僅次于美國:中國空間站機(jī)械臂能爬行,創(chuàng)新設(shè)計(jì)讓網(wǎng)友驚嘆
文章插圖
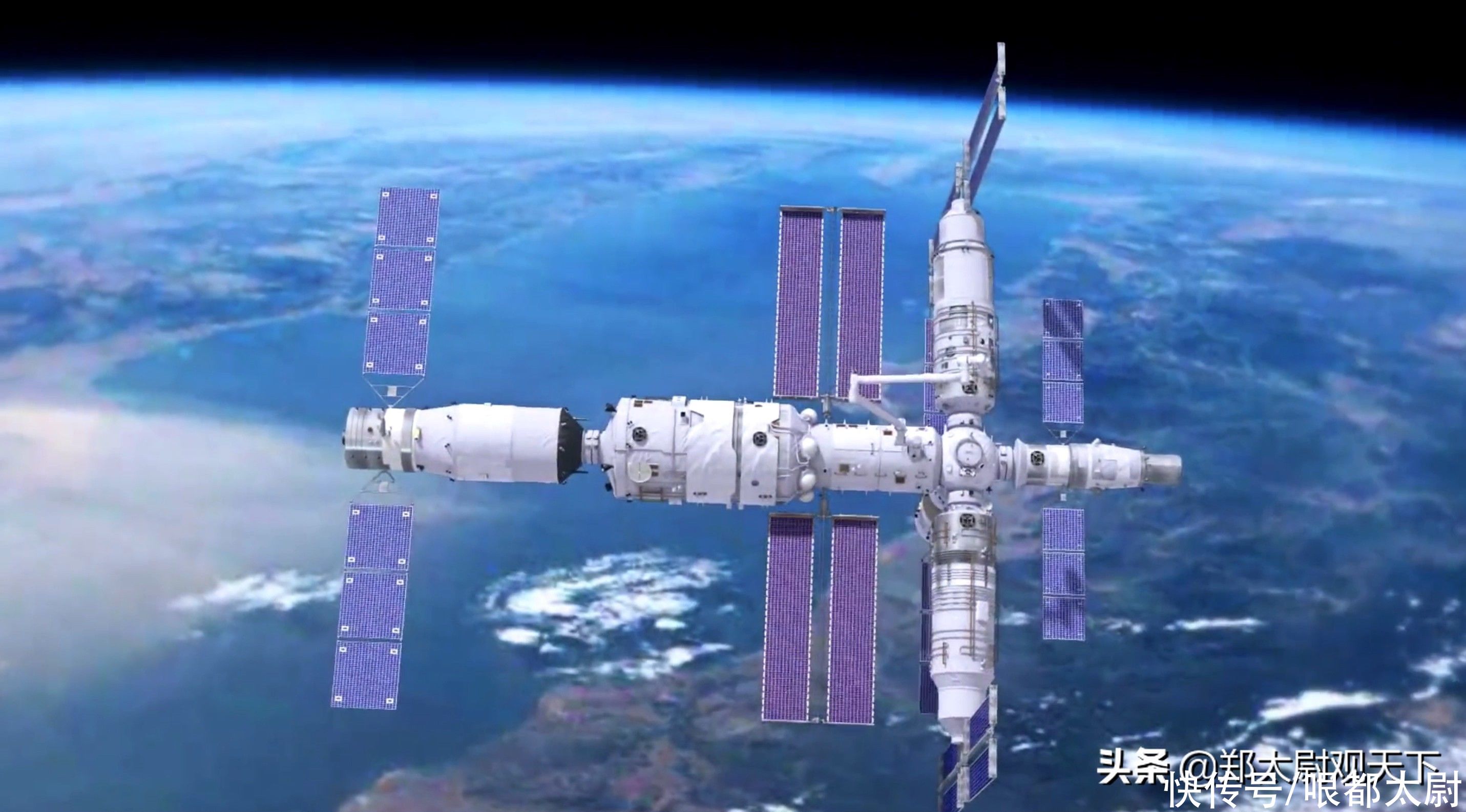
5月18日中國載人航天工程辦公室透露,空間站天和核心艙近日先后完成交會(huì)對(duì)接、航天員駐留、機(jī)械臂等平臺(tái)功能測試,以及空間應(yīng)用項(xiàng)目設(shè)備在軌性能檢查,各項(xiàng)功能正常、運(yùn)行狀態(tài)良好,已進(jìn)入交會(huì)對(duì)接軌道,后續(xù)將繼續(xù)開展與天舟二號(hào)貨運(yùn)飛船交會(huì)對(duì)接的準(zhǔn)備工作。特別是隨后中國空間技術(shù)研究院還特別公布了視頻,展示了中國空間站的機(jī)械臂一些神奇功能,讓網(wǎng)友紛紛點(diǎn)贊!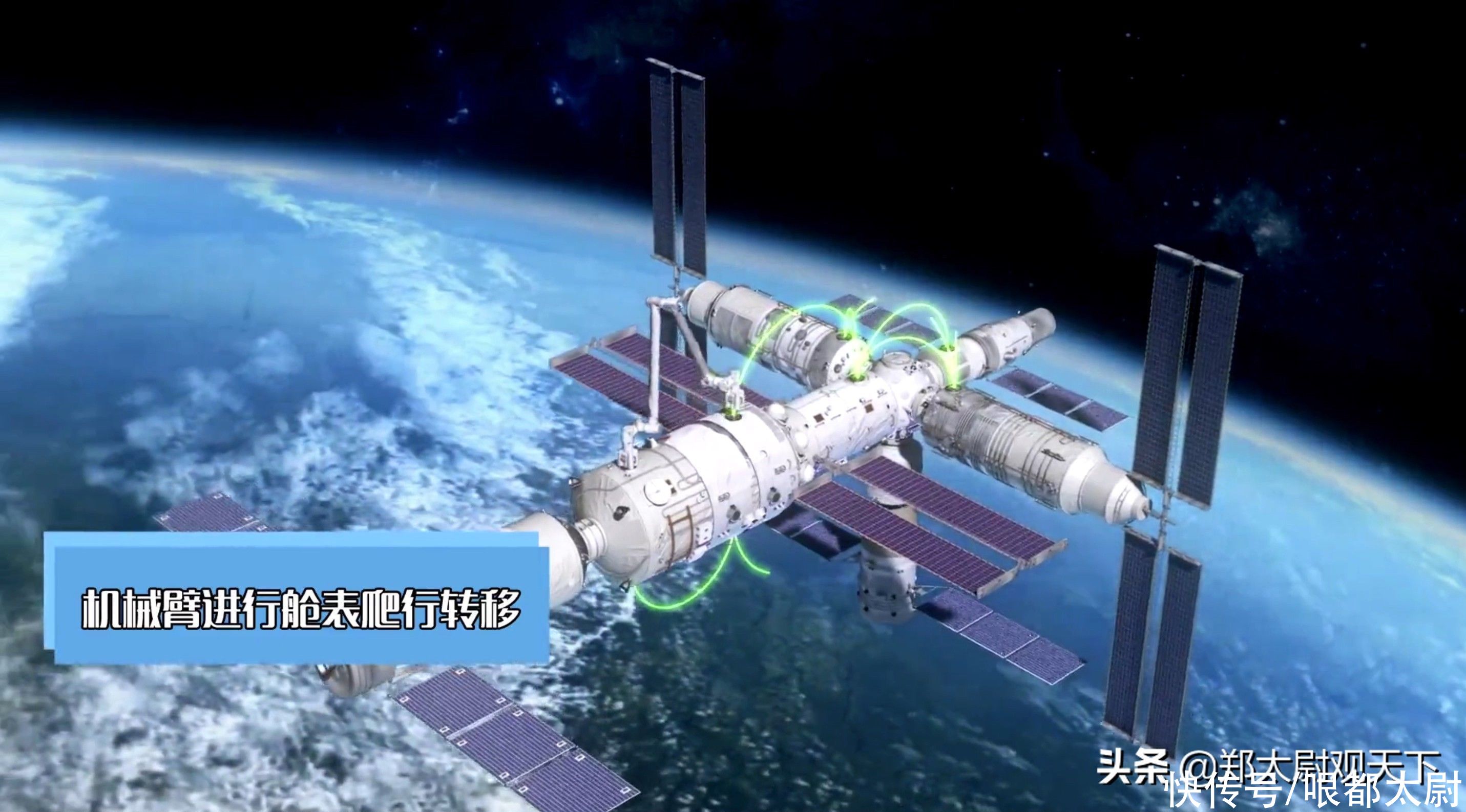
文章插圖
在這集名為太空炫舞中國臂的視頻中,展示了中國空間站機(jī)械臂具備的艙外狀態(tài)監(jiān)視、轉(zhuǎn)移實(shí)驗(yàn)艙建造空間站、轉(zhuǎn)移貨運(yùn)飛船載荷、輔助航天員出艙活動(dòng)、輔助航天員艙外修理、空間站外表破損檢查、與實(shí)驗(yàn)艙機(jī)械臂組合、空間站表面爬行轉(zhuǎn)移、監(jiān)視外部航天器等多種功能,堪稱是我們中國在外太空的多面手。特別是機(jī)械臂組合、艙外爬行等功能,讓網(wǎng)友感到十分驚艷,感覺就是一種太空變形金剛。
文章插圖
實(shí)際我們國家為了空間站工程的建造,從2007年開始就全面啟動(dòng)了空間站機(jī)械臂的研發(fā)工作,而當(dāng)時(shí)國際空間站的“加拿大臂2”型空間站機(jī)械臂,已經(jīng)服役了6年。而更早的美國航天飛機(jī)使用的加拿大臂-1型機(jī)械臂的研制,更要追溯到上世紀(jì)80年代,因此從起點(diǎn)來說,我國和西方有著巨大的差距,而背后是中國和發(fā)達(dá)國家在在機(jī)、電、控、動(dòng)力學(xué)、仿真等各個(gè)空間機(jī)器人專業(yè)方向的巨大差距。
在經(jīng)過10多年的積淀和發(fā)展后,可以說我國的空間站機(jī)械臂工作,已經(jīng)逐漸達(dá)到了國際領(lǐng)先水平,僅次于美國在國際空間站使用的“加拿大臂2”型機(jī)械臂,而領(lǐng)先于歐洲在俄羅斯艙安裝的歐洲機(jī)械臂和日本在日本艙段安裝的日本機(jī)械臂。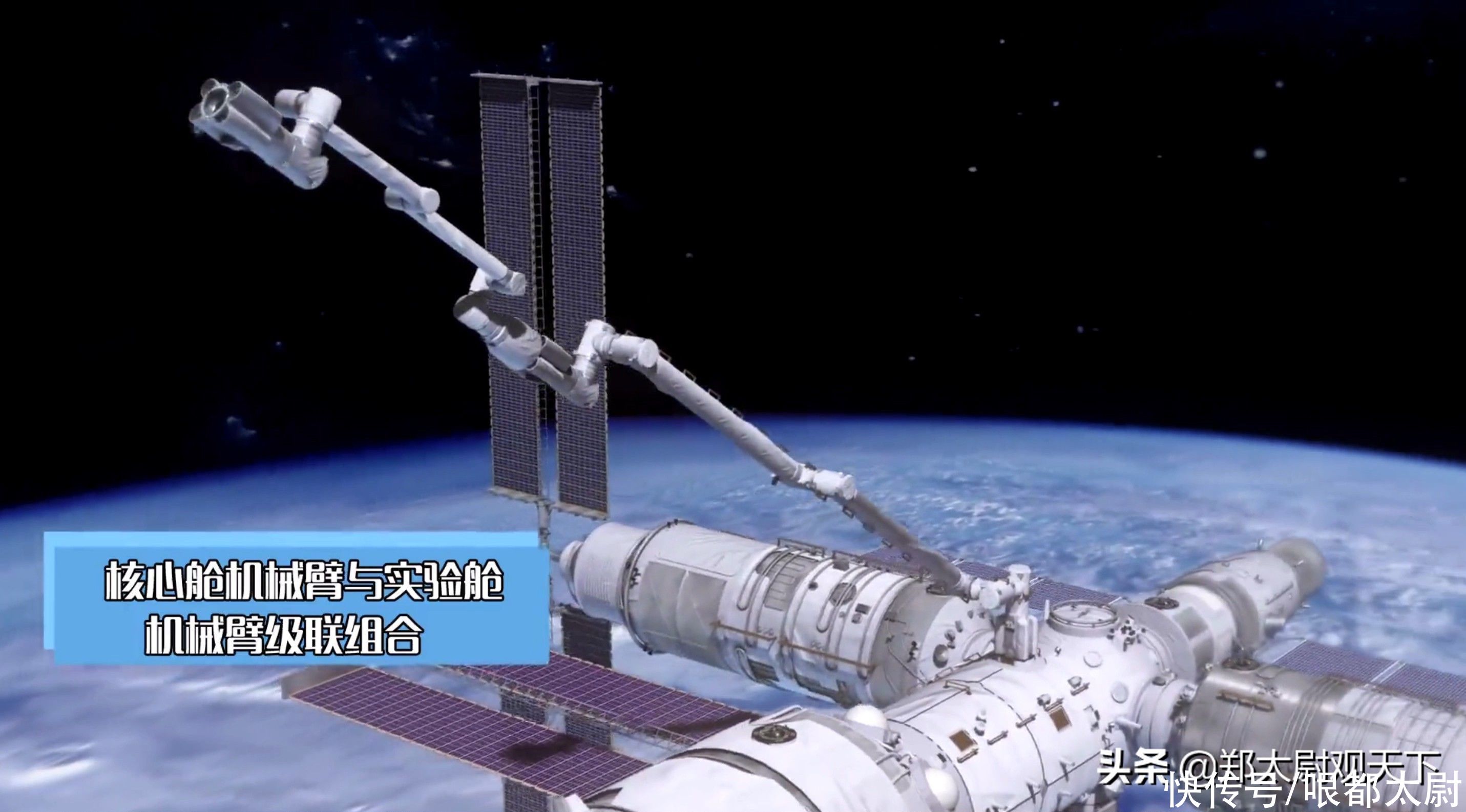
文章插圖
例如我國的機(jī)械臂長度為10.2米,與問天實(shí)驗(yàn)艙機(jī)械臂組合后長度能達(dá)到15米,僅次于美國的17.6米,遠(yuǎn)大于歐洲的11.3米和日本的9.9米,而在承載能力上,中國機(jī)械臂能承載25噸重量,小于美國的116噸,但遠(yuǎn)大于歐洲的8噸和日本的7噸。這證明我國已經(jīng)在高精度伺服控制技術(shù)、核心機(jī)構(gòu)部件設(shè)計(jì)技術(shù)、柔性動(dòng)力學(xué)建模與分析技術(shù)、目標(biāo)識(shí)別與測量技術(shù)等方面都實(shí)現(xiàn)了巨大的突破。嚴(yán)格意義上說,美國現(xiàn)在棄用加拿大臂如果自己來研制,也未必能有多高的水平。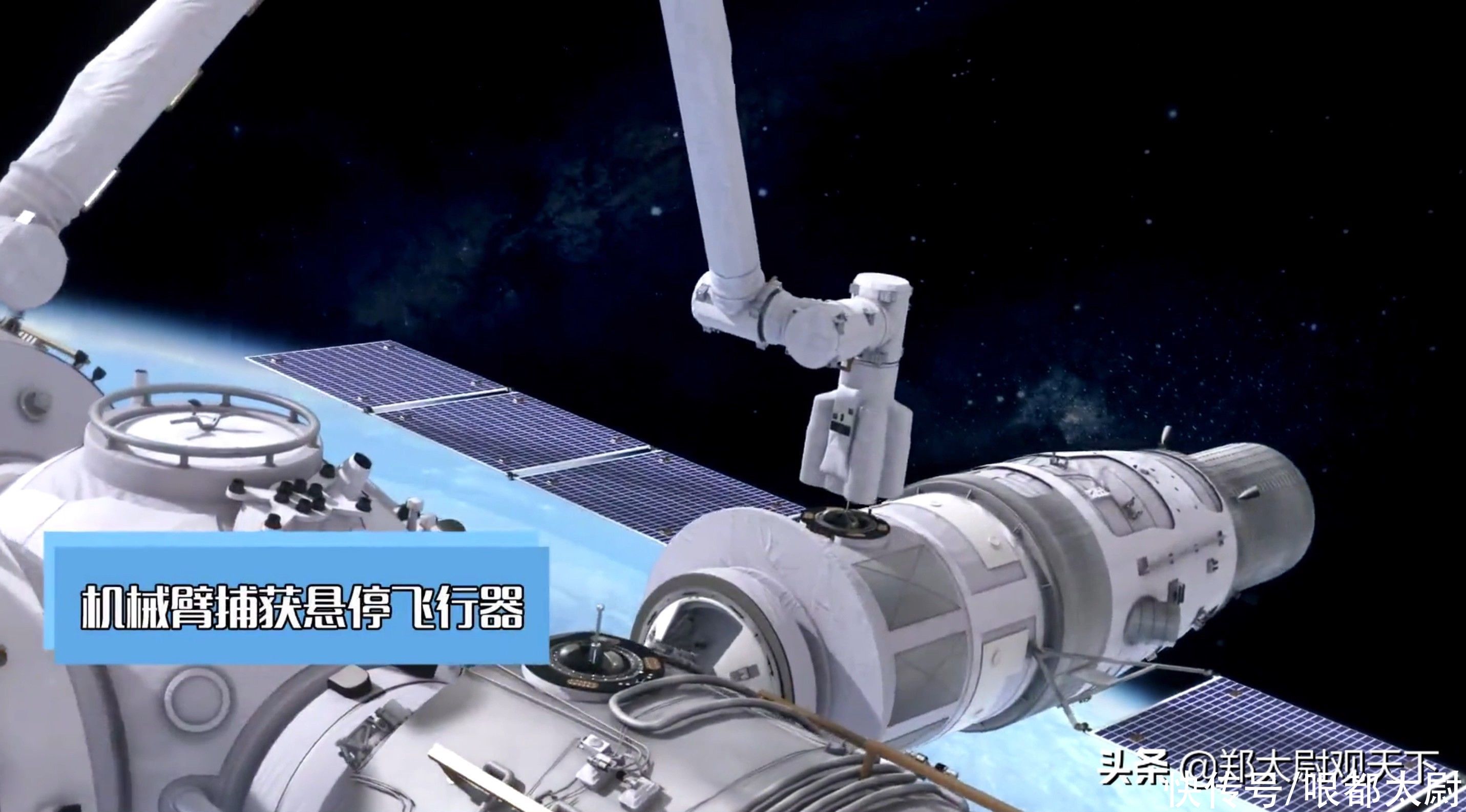
文章插圖
【 機(jī)械臂|長10米僅次于美國:中國空間站機(jī)械臂能爬行,創(chuàng)新設(shè)計(jì)讓網(wǎng)友驚嘆】而網(wǎng)友大呼過癮的機(jī)械臂組合技術(shù),由于核心艙機(jī)械臂與實(shí)驗(yàn)艙機(jī)械臂的直徑不同,就需要設(shè)計(jì)轉(zhuǎn)接連接件,而且核心艙機(jī)械臂設(shè)計(jì)有實(shí)驗(yàn)艙機(jī)械臂所需的測控接口及信息接口,在兩臂組合時(shí)就能實(shí)現(xiàn)電氣連接。要實(shí)現(xiàn)空間自動(dòng)電器連接,首先應(yīng)保證被連接物之間的高精度對(duì)接。機(jī)械臂的視覺相機(jī)必須實(shí)現(xiàn)視場范圍內(nèi)已知尺寸、形狀、分布和數(shù)量等信息的視覺標(biāo)記快速、可靠的檢測和連續(xù)跟蹤,并實(shí)時(shí)連續(xù)輸出相對(duì)位置信息。
文章插圖
而更神奇的艙外爬行技術(shù),實(shí)際美國使用的加拿大臂2型機(jī)械臂已經(jīng)具備艙外爬行的功能,但存在兩個(gè)問題。首先國際空間站是多國聯(lián)合制造,艙段各不相同,俄羅斯和日本還都使用了歐洲機(jī)械臂和日本機(jī)械臂,根本也沒有預(yù)留讓美國機(jī)械臂爬行的接口,因此美國的機(jī)械臂只能在美國制造的艙段上活動(dòng),實(shí)際并不能達(dá)到爬行的目的,而且也很少進(jìn)行爬行工作。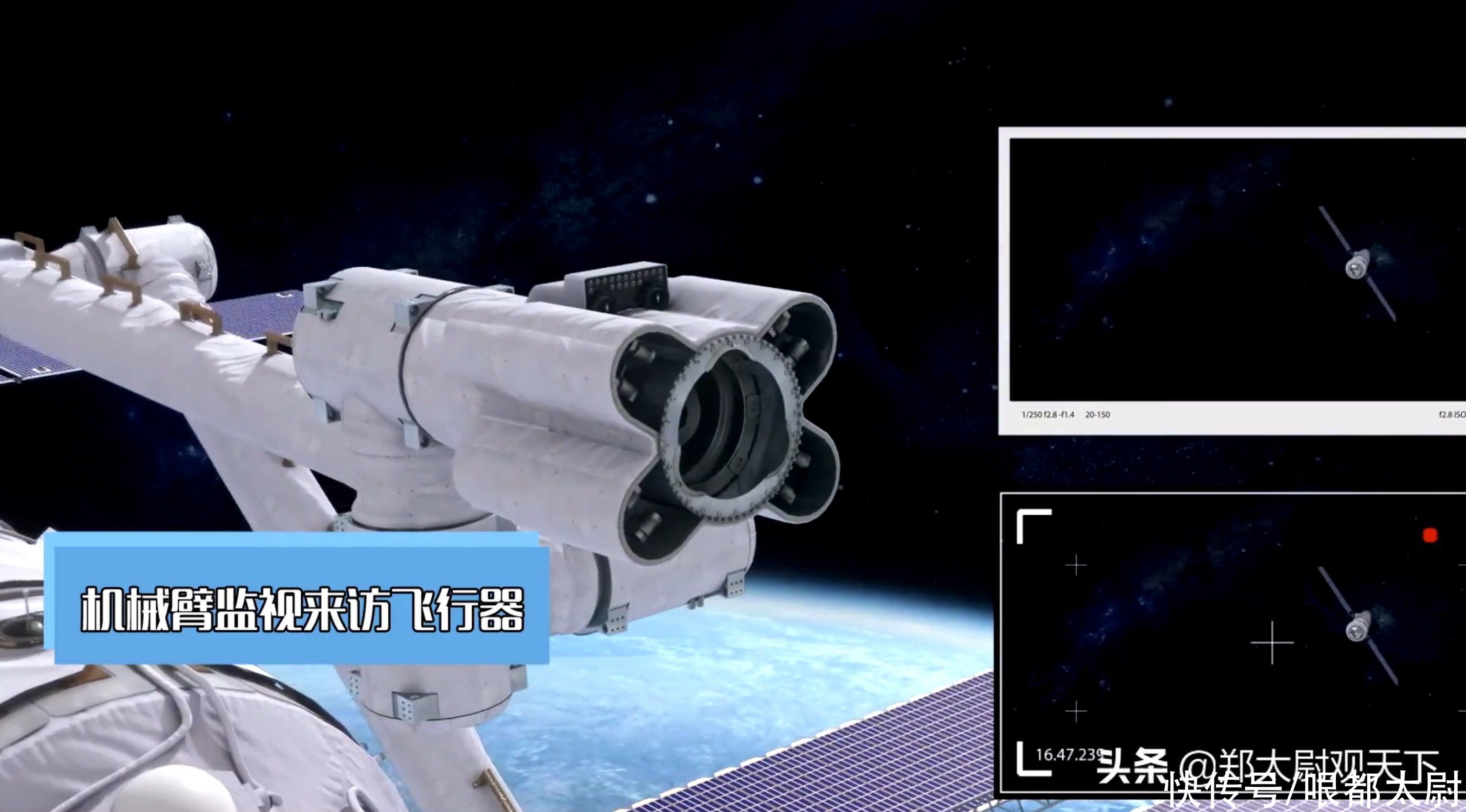
文章插圖
另外美國機(jī)械臂盡管能夠爬行,但是當(dāng)它移動(dòng)到新的“錨點(diǎn)”,只能夠獲得數(shù)據(jù)連接和視頻信號(hào)連接,此外就是基本的運(yùn)轉(zhuǎn)的動(dòng)力,因此美國的機(jī)械臂只能爬行觀察情況,但不具備載荷抓握的能力,而我國的機(jī)械臂和艙外錨點(diǎn)則進(jìn)行了進(jìn)一步的改進(jìn),使得機(jī)械臂在移動(dòng)后也具備了載荷抓握的能力。這就意味著我國空間站機(jī)械臂可工作的范圍極大擴(kuò)展。實(shí)際這種更為全面的機(jī)械臂爬行功能,也是美國在未來探月的星門空間站所要實(shí)現(xiàn)的功能。
我國通過空間站機(jī)械臂的研制,實(shí)現(xiàn)了空間機(jī)器人產(chǎn)品的全流程研制,培養(yǎng)了一大批人才,實(shí)現(xiàn)了空間機(jī)器人系統(tǒng)研制體系的全方位構(gòu)建。不但能夠滿足空間站機(jī)械臂的使用,而且還應(yīng)用到月球探測采樣機(jī)械臂、火星車移動(dòng)系統(tǒng)等空間機(jī)器人系統(tǒng)研制需求,同時(shí)這些技術(shù)還可滿足外骨骼機(jī)器人等軍民融合方面的應(yīng)用拓展。
推薦閱讀







- 中國經(jīng)濟(jì)網(wǎng) 航天工程董事長唐國宏辭職 姜從斌接棒
- 通信技術(shù) 輪值董事長徐直軍:華為2009年已開始研究5G
- 上戲 黃景瑜燒烤師傅逆襲頂流,素人起家偶像硬漢通吃,成長之路不簡單
- 大循環(huán) 淡水資源緊缺,為何不攔截長江和黃河自用,而是任其流入大海?
- 湖南衛(wèi)視 黃曉明再當(dāng)?shù)觊L,龔俊、丁真疑加盟,《中餐廳5》能大爆嗎?
- 韓安冉 變形計(jì):她是長相最漂亮富家女,拒絕像韓安冉一樣,還拒絕《青你2》
- 火箭 長三乙火箭送風(fēng)云四號(hào)02星升空 金牌火箭開啟新一輪高密度發(fā)射
- 德克斯特 國際空間站機(jī)械手臂遭太空垃圾撞擊,幸好沒事
- 太空垃圾 太空垃圾“擊傷”國際空間站機(jī)械臂
- 運(yùn)載火箭 長征七號(hào)運(yùn)載火箭緣何推遲發(fā)射