一種適用于眼內顯微手術五自由度操作的新型電磁驅動系統
電磁驅動系統旨在實現眼后部微型機器人的靈活 5 自由度磁操縱,從而實現精準的靶向藥物輸送 。研究團隊提出了一種新型電磁驅動系統,該系統由八個優化的電磁鐵組成,這些電磁鐵以最佳配置排列,并采用基于主動抗擾控制器 (ADRC) 和虛擬邊界的控制框架 。
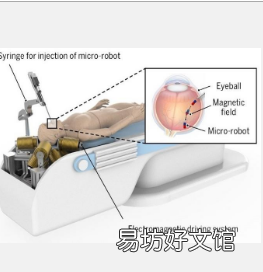
文章插圖
該團隊于 2024 年 3 月 23 日在《Cyborg and Bionic Systems》上發表了他們的研究成果 。
眼內顯微手術已從傳統的手持手術器械過渡到機器人輔助手術,因為機器人輔助手術能夠有效減輕術中術者的生理性震顫,實現精確的運動縮放 。然而,隨著機器人輔助設備越來越接近眼后部,可能會不小心將器械放置得太深,或在術者控制下施加過大的鞏膜力 , 從而損傷視網膜或鞏膜 , 導致出血甚至嚴重損傷 。上述原因導致術中和術后并發癥的發生率為 2% 至 30% 。
這些5自由度電磁驅動系統與現有的機器人輔助系統相比,具有獨特的驅動范式 。它通常采用力控制模式而不是位置控制模式 , 這使微型機器人成為一種更安全的眼后部交互工具 。在力控制模式下 , 電磁驅動系統可以通過限制相互作用力來有效降低造成不可修復的視網膜損傷的風險 , 即使在患者移動或系統故障的情況下也是如此 。然而,在大工作空間內產生高強度的磁場和磁力是一項挑戰 。因此,為提供高磁場和磁力產生能力的系統配置和電磁鐵參數的設計優化應運而生,并引起了廣泛的關注 。此外,由于電磁線圈建模不準確、液體環境中相互作用力的變化等多種因素會引入干擾,因此也有必要研究合適的控制框架 。
針對上述問題,研究人員提出了一種用于眼內顯微手術的五自由度磁操縱的新型電磁驅動系統 。提出并實施了兩步設計優化,以獲得最佳的系統配置和電磁鐵參數,以提高持續工作能力 。通過提出的配置優化程序和電磁鐵的多目標優化,該系統可以執行更精確、更穩定的操縱,并獲得更強的持續工作能力 。此外,該系統采用結合 ADRC 控制器和虛擬邊界的控制框架來增強眼內顯微手術的魯棒性和安全性 。
通過仿真和分析,評估了所提出的設計優化和控制框架的影響 。利用結合了 ADRC 控制器和虛擬邊界的控制框架,在不同操作模式下進行了性能評估和軌跡跟蹤性能測試,驗證了其與 PID 和 TDE 控制器相比的性能和有效性 。結果表明,在無擾動性能測試中,最大誤差和最大 RMS 誤差均顯著降低,降低幅度分別從 47.1% 到 65.4% 和 62.7% 到 84.4% 。此外 , 本文進行的性能測試還考慮了其??他相關工作忽略的擾動 。所得結果表明系統在存在擾動時具有顯著的魯棒性,最大誤差和 RMS 誤差分別低于 172.2 和 35.8 μm 。
【一種適用于眼內顯微手術五自由度操作的新型電磁驅動系統】展望未來,研究人員將采用更精確的磁場-電流模型,進一步提高定位精度 , 擴大開放空間內的可用工作空間 。此外,未來的工作還將探索實現基于光纖布拉格光柵 (FBG) 的電磁鐵溫度實時檢測,旨在加強安全措施 。
推薦閱讀







- 有請潘周聃是什么梗一種特別酷拽的出場方式 有請潘周聃等人完整版的原視頻
- 咬定青山不放松寫的是什么植物 咬定青山不放松寫的是哪一種植物
- 適用于PC的Copilot+前所未有的功率和效率
- 適用于索尼E卡口的全新7Artisans AF 27mm F2.8 STM鏡頭
- 電纜穿刺線夾 電纜穿刺線夾施工技術主要適用于
- 適馬推出適用于索尼E和L卡口的50mm f1.2 DG DN Art鏡頭
- 一種可以幫助治愈后悔之痛的強大技術
- 領頭羊分別指哪一類人 領頭羊分別指哪一種人
- 能量飲料對你到底有多糟糕心臟病發作只是眾多風險中的一種
- 獅鬃菇一種奇異的功能性蘑菇可促進大腦健康并提供許多其他健康益處